Table of Contents

Chapter 3
TRIGONOMETRIC FUNCTIONS
A mathematician knows how to solve a problem, he can not solve it. – Milne
3.1 Introduction
The word ‘trigonometry’ is derived from the Greek words ‘trigon’ and ‘metron’ and it means ‘measuring the sides of a triangle’. The subject was originally developed to solve geometric problems involving triangles. It was studied by sea captains for navigation, surveyor to map out the new lands, by engineers and others. Currently, trigonometry is used in many areas such as the science of seismology, designing electric circuits, describing the state of an atom, predicting the heights of tides in the ocean, analysing a musical tone and in many other areas.
Arya Bhatt
(476-550)
In earlier classes, we have studied the trigonometric ratios of acute angles as the ratio of the sides of a right angled triangle. We have also studied the trigonometric identities and application of trigonometric ratios in solving the problems related to heights and distances. In this Chapter, we will generalise the concept of trigonometric ratios to trigonometric functions and study their properties.
3.2 Angles
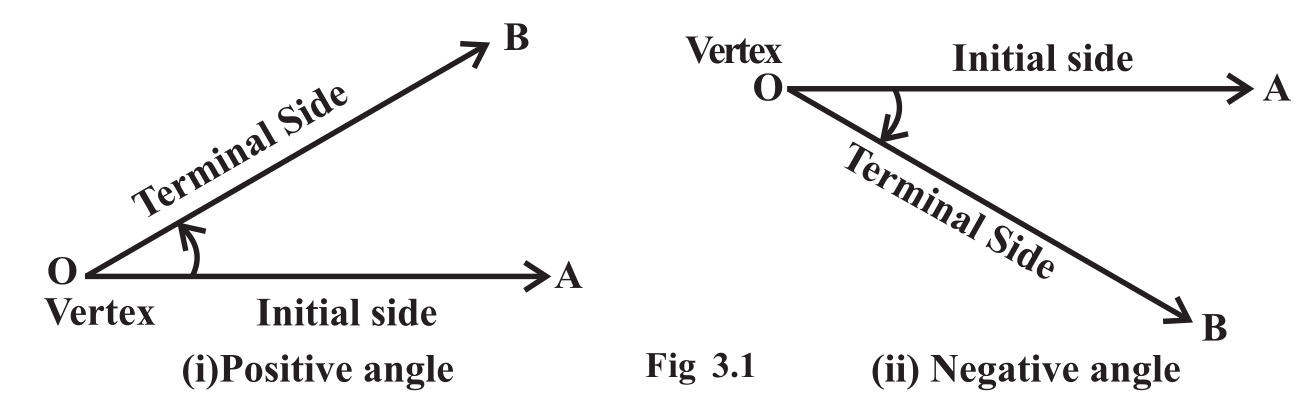
Angle is a measure of rotation of a given ray about its initial point. The original ray is called the initial side and the final position of the ray after rotation is called the terminal side of the angle. The point of rotation is called the vertex. If the direction of rotation is anticlockwise, the angle is said to be positive and if the direction of rotation is clockwise, then the angle is negative (Fig 3.1).
The measure of an angle is the amount of rotation performed to get the terminal side from the initial side. There are several units for measuring angles. The definition of an angle suggests a unit, viz. one complete revolution from the position of the initial side as indicated in Fig 3.2.
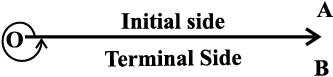
Fig 3.2
This is often convenient for large angles. For example, we can say that a rapidly spinning wheel is making an angle of say 15 revolution per second. We shall describe two other units of measurement of an angle which are most commonly used, viz. degree measure and radian measure.
3.2.1 Degree measure
If a rotation from the initial side to terminal side is  of a revolution, the angle is said to have a measure of one degree, written as 1°. A degree is divided into 60 minutes, and a minute is divided into 60 seconds . One sixtieth of a degree is called a minute, written as 1′, and one sixtieth of a minute is called a second, written as 1″. Thus, 1° = 60′, 1′ = 60″
of a revolution, the angle is said to have a measure of one degree, written as 1°. A degree is divided into 60 minutes, and a minute is divided into 60 seconds . One sixtieth of a degree is called a minute, written as 1′, and one sixtieth of a minute is called a second, written as 1″. Thus, 1° = 60′, 1′ = 60″
Some of the angles whose measures are 360°,180°, 270°, 420°, – 30°, – 420° are shown in Fig 3.3.
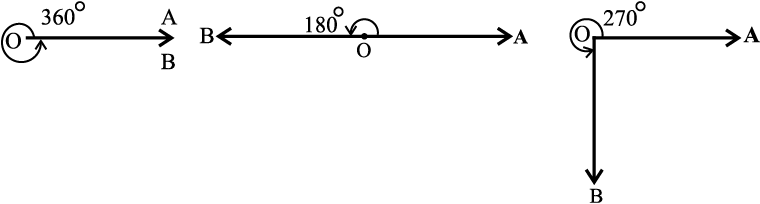
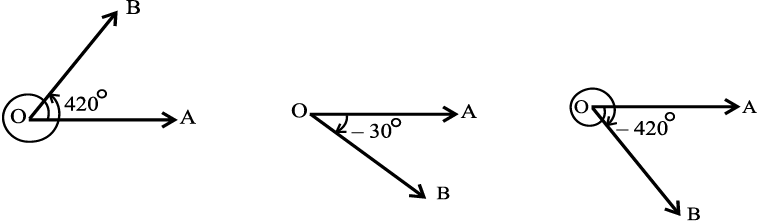
Fig 3.3
3.2.2 Radian measure
There is another unit for measurement of an angle, called the radian measure. Angle subtended at the centre by an arc of length 1 unit in a unit circle (circle of radius 1 unit) is said to have a measure of 1 radian. In the Fig 3.4(i) to (iv), OA is the initial side and OB is the terminal side. The figures show the angles whose measures are 1 radian, –1 radian, 1 radian and –1
radian and –1 radian.
radian.
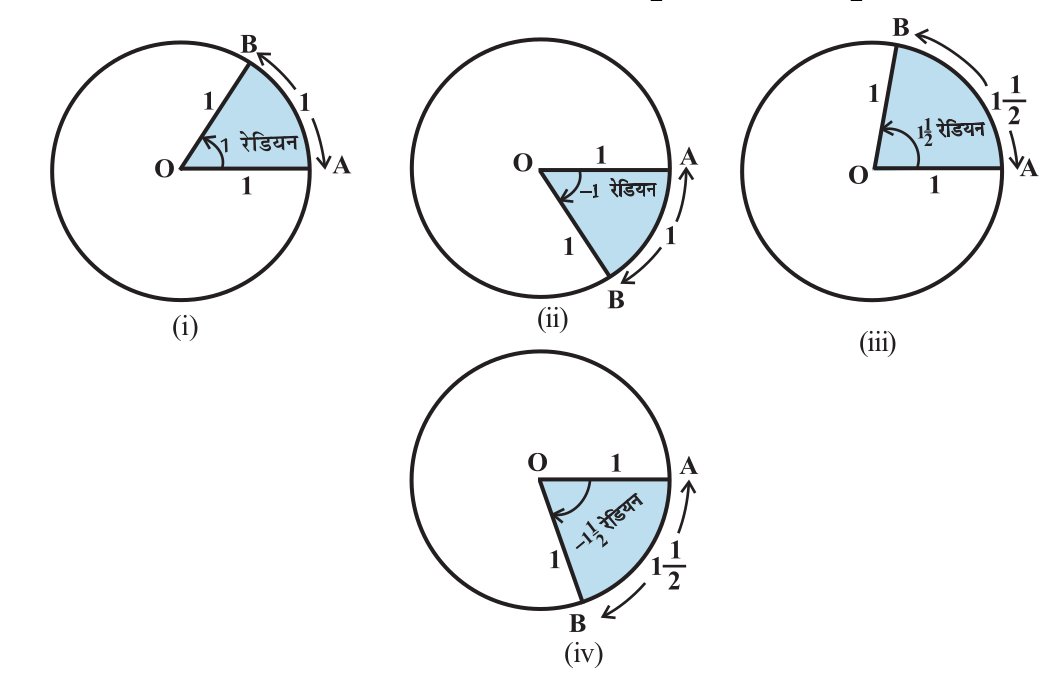
Fig 3.4 (i) to (iv)
We know that the circumference of a circle of radius 1 unit is 2π. Thus, one complete revolution of the initial side subtends an angle of 2π radian.
More generally, in a circle of radius r, an arc of length r will subtend an angle of 1 radian. It is well-known that equal arcs of a circle subtend equal angle at the centre. Since in a circle of radius r, an arc of length r subtends an angle whose measure is 1 radian, an arc of length l will subtend an angle whose measure is  radian. Thus, if in a circle of radius r, an arc of length l subtends an angle θ radian at the centre, we have θ =
radian. Thus, if in a circle of radius r, an arc of length l subtends an angle θ radian at the centre, we have θ =  or l = r θ.
or l = r θ.
3.2.3 Relation between radian and real numbers
Consider the unit circle with centre O. Let A be any point on the circle. Consider OA as initial side of an angle. Then the length of an arc of the circle will give the radian measure of the angle which the arc will subtend at the centre of the circle. Consider the line PAQ which is tangent to the circle at A. Let the point A represent the real number zero, AP represents positive real number and AQ represents negative real numbers (Fig 3.5). If we rope the line AP in the anticlockwise direction along the circle, and AQ in the clockwise direction, then every real number will correspond to a radian measure and conversely. Thus, radian measures and real numbers can be considered as one and the same.
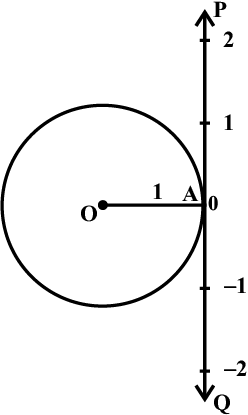
Fig 3.5
3.2.4 Relation between degree and radian
Since a circle subtends at the centre an angle whose radian measure is 2π and its degree measure is 360°, it follows that
2π radian = 360° or π radian = 180°
The above relation enables us to express a radian measure in terms of degree measure and a degree measure in terms of radian measure. Using approximate value of π as  , we have
, we have
1 radian =  = 57° 16′ approximately.
= 57° 16′ approximately.
Also 1° =  radian = 0.01746 radian approximately.
radian = 0.01746 radian approximately.
The relation between degree measures and radian measure of some common angles are given in the following table:

Notational Convention
Since angles are measured either in degrees or in radians, we adopt the convention that whenever we write angle θ°, we mean the angle whose degree measure is θ and whenever we write angle β, we mean the angle whose radian measure is β.
Note that when an angle is expressed in radians, the word ‘radian’ is frequently omitted. Thus,  are written with the understanding that π and
are written with the understanding that π and  are radian measures. Thus, we can say that
are radian measures. Thus, we can say that
Radian measure =  Degree measure
Degree measure
Degree measure =  Radian measure
Radian measure
Example 1 Convert 40° 20′ into radian measure.
Solution We know that 180° = π radian.
Hence 40° 20′ = 40  degree =
degree =  radian =
radian = radian.
radian.
Therefore 40° 20′ = radian.
Example 2 Convert 6 radians into degree measure.
Solution We know that π radian = 180°.
Hence 6 radians = 6 degree =  degree
degree
= 343 degree = 343° +
degree = 343° +  minute [as 1° = 60′]
minute [as 1° = 60′]
= 343° + 38′ +  minute [as 1′ = 60″]
minute [as 1′ = 60″]
= 343° + 38′ + 10.9″ = 343°38′ 11″ approximately.
Hence 6 radians = 343° 38′ 11″ approximately.
Example 3 Find the radius of the circle in which a central angle of 60° intercepts an arc of length 37.4 cm (use  ).
).
Solution
Example 4 The minute hand of a watch is 1.5 cm long. How far does its tip move in 40 minutes? (Use π = 3.14).
Solution In 60 minutes, the minute hand of a watch completes one revolution. Therefore, in 40 minutes, the minute hand turns through  of a revolution. Therefore,
of a revolution. Therefore,  or
or  radian. Hence, the required distance travelled is given by
radian. Hence, the required distance travelled is given by

Example 5 If the arcs of the same lengths in two circles subtend angles 65°and 110° at the centre, find the ratio of their radii.
Solution Let r1 and r2 be the radii of the two circles. Given that
Let l be the length of each of the arc. Then l = r1θ1 = r2θ2, which gives
EXERCISE 3.1
1. Find the radian measures corresponding to the following degree measures:
(i) 25° (ii) – 47°30′ (iii) 240° (iv) 520°
2. Find the degree measures corresponding to the following radian measures (Use ).
(i)  (ii) – 4 (iii)
(ii) – 4 (iii) (iv)
(iv)
3. A wheel makes 360 revolutions in one minute. Through how many radians does it turn in one second?
4. Find the degree measure of the angle subtended at the centre of a circle of radius 100 cm by an arc of length 22 cm (Use ).
5. In a circle of diameter 40 cm, the length of a chord is 20 cm. Find the length of minor arc of the chord.
6. If in two circles, arcs of the same length subtend angles 60° and 75° at the centre, find the ratio of their radii.
7. Find the angle in radian through which a pendulum swings if its length is 75 cm and th e tip describes an arc of length
(i) 10 cm (ii) 15 cm (iii) 21 cm
3.3 Trigonometric Functions
In earlier classes, we have studied trigonometric ratios for acute angles as the ratio of sides of a right angled triangle. We will now extend the definition of trigonometric ratios to any angle in terms of radian measure and study them as trigonometric functions.
Consider a unit circle with centre at origin of the coordinate axes. Let P (a, b) be any point on the circle with angle AOP = x radian, i.e., length of arc AP = x (Fig 3.6).
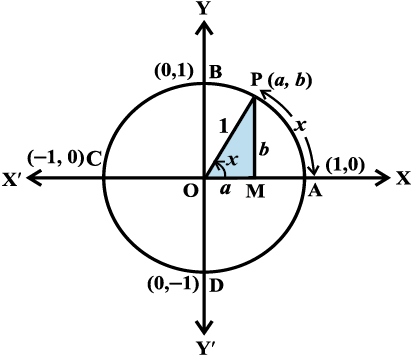
Fig 3.6
We define cos x = a and sin x = b
Since ∆OMP is a right triangle, we have
OM2 + MP2 = OP2 or a2 + b2 = 1
Thus, for every point on the unit circle, we have
a2 + b2 = 1 or cos2x + sin2x = 1
Since one complete revolution subtends an angle of 2π radian at the centre of the circle, ∠AOB =  , ∠AOC = π and ∠AOD =
, ∠AOC = π and ∠AOD = . All angles which are integral multiples of are called quadrantal angles. The coordinates of the points A, B, C and D are, respectively,
. All angles which are integral multiples of are called quadrantal angles. The coordinates of the points A, B, C and D are, respectively,
(1, 0), (0, 1), (–1, 0) and (0, –1). Therefore, for quadrantal angles, we have
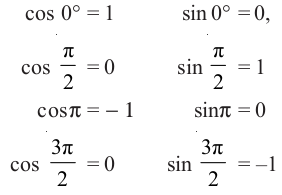
cos 2π = 1 sin 2π = 0
Now, if we take one complete revolution from the point P, we again come back to same point P. Thus, we also observe that if x increases (or decreases) by any integral multiple of 2π, the values of sine and cosine functions do not change. Thus, sin (2nπ + x) = sin , n ∈ Z , cos (2nπ + x) = cos, n ∈ Z
, n ∈ Z , cos (2nπ + x) = cos, n ∈ Z
Further, sin x = 0, if = 0, ± π, ± 2π , ± 3π, ..., i.e., when x is an integral multiple of π
and cos x = 0, if  ... i.e., cos x vanishes when x is an odd multiple of
... i.e., cos x vanishes when x is an odd multiple of  . Thus
. Thus
sin x = 0 implies x = nπ, where n is any integer
cos x = 0 implies x = (2n + 1)  , where n is any integer.
, where n is any integer.
We now define other trigonometric functions in terms of sine and cosine functions:
cosec x =  , x ≠ nπ, where n is any integer.
, x ≠ nπ, where n is any integer.
sec x =  , x ≠ (2n + 1) , where n is any integer.
, x ≠ (2n + 1) , where n is any integer.
tan x =  , x ≠ (2n +1), where n is any integer.
, x ≠ (2n +1), where n is any integer.
cot x =  , x ≠ n π, where n is any integer.
, x ≠ n π, where n is any integer.
We have shown that for all real x, sin2 x + cos2 x = 1
It follows that
1 + tan2 x = sec2 x (why?)
1 + cot2 x = cosec2 x (why?)
In earlier classes, we have discussed the values of trigonometric ratios for 0°, 30°, 45°, 60° and 90°. The values of trigonometric functions for these angles are same as that of trigonometric ratios studied in earlier classes. Thus, we have the following table:
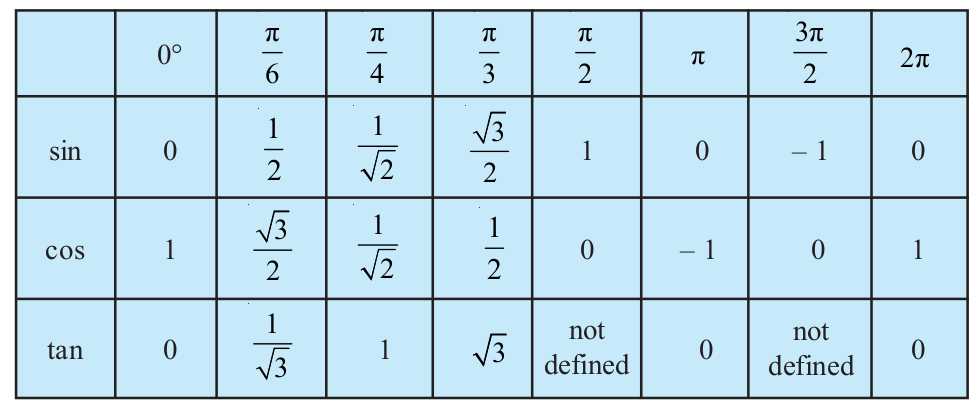
The values of cosec x, sec x and cot x are the reciprocal of the values of sin x, cos x and tan x, respectively.
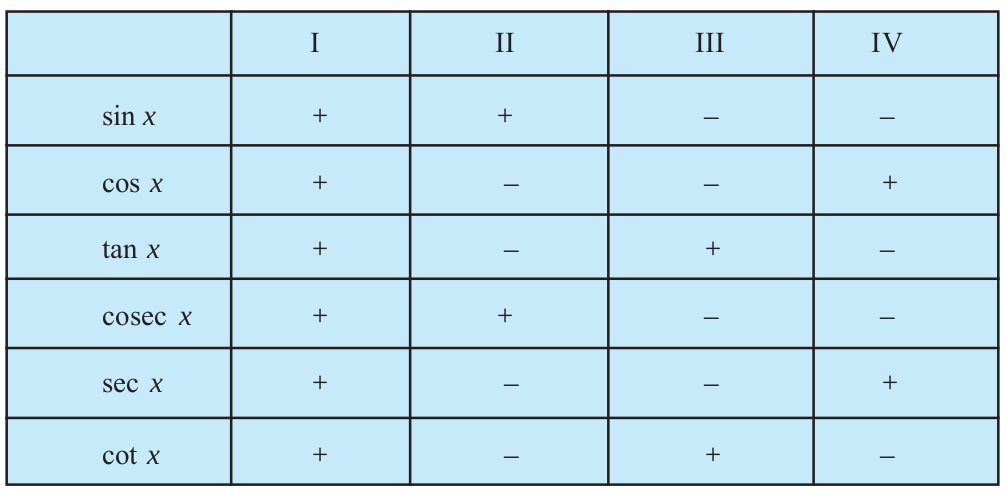
3.3.1 Sign of trigonometric functions
Let P (a, b) be a point on the unit circle with centre at the origin such that
∠AOP = x. If ∠AOQ = – x, then the coordinates of the point Q will be (a, –b) (Fig 3.7). Therefore cos (– x) = cos x
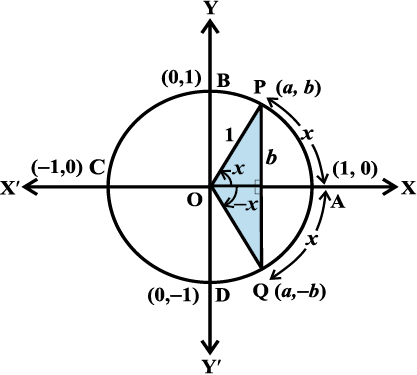
Fig 3.7
and sin (– x) = – sin x
Since for every point P (a, b) on the unit circle, – 1 ≤ a ≤ 1 and – 1 ≤ b ≤ 1, we have – 1 ≤ cos x ≤ 1 and –1 ≤ sin x ≤ 1 for all x. We have learnt in previous classes that in the first quadrant (0 < x < ) a and b are both positive, in the second quadrant ( < x <π) a is negative and b is positive, in the third quadrant
(π < x < ) a and b are both negative and in the fourth quadrant ( < x < 2π) a is positive and b is negative. Therefore, sin x is positive for 0 < x < π, and negative for
π < x < 2π. Similarly, cos x is positive for 0 < x < , negative for < x <and also positive for< x < 2π. Likewise, we can find the signs of other trigonometric functions in different quadrants. In fact, we have the following table.
3.3.2 Domain and range of trigonometric functions
From the definition of sine and cosine functions, we observe that they are defined for all real numbers. Further, we observe that for each real number x,
– 1 ≤ sin x ≤ 1 and – 1 ≤ cos x ≤ 1
Thus, domain of y = sin x and y = cos x is the set of all real numbers and range is the interval [–1, 1], i.e., – 1 ≤ y ≤ 1.
Since cosec x =  , the domain of y = cosec x is the set { x : x ∈ R and
, the domain of y = cosec x is the set { x : x ∈ R and
x ≠ n π, n ∈ Z} and range is the set {y : y ∈ R, y ≥ 1 or y ≤ – 1}. Similarly, the domain of y = sec x is the set {x : x ∈ R and x ≠ (2n + 1) , n ∈ Z} and range is the set
{y : y ∈ R, y ≤ – 1or y ≥ 1}. The domain of y = tan x is the set {x : x ∈ R and
x ≠ (2n + 1) , n ∈ Z} and range is the set of all real numbers. The domain of
y = cot x is the set {x : x ∈ R and x ≠ n π, n ∈ Z} and the range is the set of all real numbers.
We further observe that in the first quadrant, as x increases from 0 to , sin x increases from 0 to 1, as x increases from to π, sin x decreases from 1 to 0. In the third quadrant, as x increases from π to, sin x decreases from 0 to –1and finally, in the fourth quadrant, sin x increases from –1 to 0 as x increases from to 2π. Similarly, we can discuss the behaviour of other trigonometric functions. In fact, we have the following table:
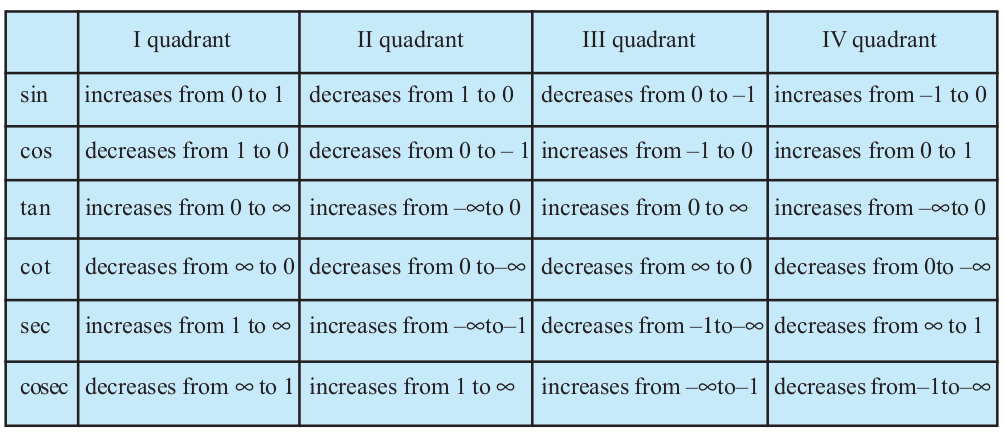
Remark In the above table, the statement tan x increases from 0 to ∞ (infinity) for 0 < x < simply means that tan x increases as x increases for 0 < x < and assumes arbitraily large positive values as x approaches to . Similarly, to say that cosec x decreases from –1 to – ∞ (minus infinity) in the fourth quadrant means that cosec x decreases for x ∈ (, 2π) and assumes arbitrarily large negative values as x approaches to 2π. The symbols ∞ and – ∞ simply specify certain types of behaviour of functions and variables.
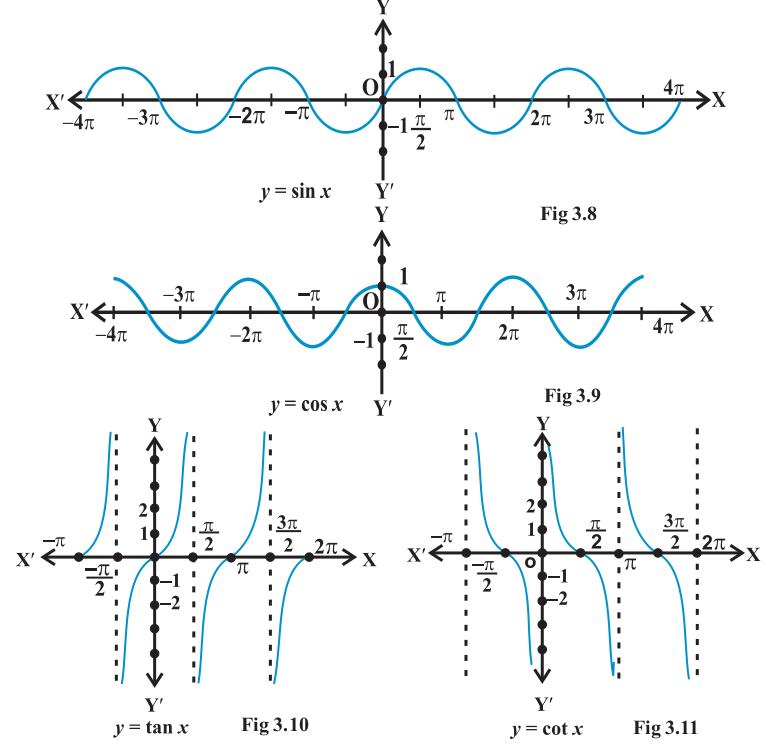
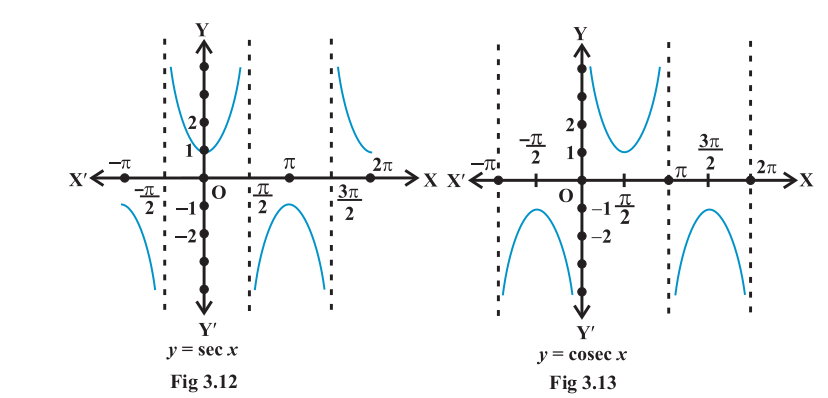
We have already seen that values of sin x and cos x repeats after an interval of 2π. Hence, values of cosec x and sec x will also repeat after an interval of 2π. We shall see in the next section that tan (π + x) = tan x. Hence, values of tan x will repeat after an interval of π. Since cot x is reciprocal of tan x, its values will also repeat after an interval of π. Using this knowledge and behaviour of trigonometic functions, we can sketch the graph of these functions. The graph of these functions are given above:
Example 6 If cos x = –  , x lies in the third quadrant, find the values of other five trigonometric functions.
, x lies in the third quadrant, find the values of other five trigonometric functions.
Solution Since cos x =  , we have sec x =
, we have sec x = 
Now sin2 x + cos2 x = 1, i.e., sin2 x = 1 – cos2 x
or sin2 x = 1 –  =
= 
Hence sin x = ± 
Since x lies in third quadrant, sin x is negative. Therefore
sin x = –
which also gives
cosec x = – 
tan x = =  and cot x = =
and cot x = =  .
.
Example 7 If cot x = –  , x lies in second quadrant, find the values of other five trigonometric functions.
, x lies in second quadrant, find the values of other five trigonometric functions.
Solution Since cot x = – , we have tan x = – 
Now sec2 x = 1 + tan2 x = 1 +  =
= 
Hence sec x = ± 
Since x lies in second quadrant, sec x will be negative. Therefore
sec x = – ,
which also gives
Further, we have
sin x = tan x cos x = (– ) (–  ) =
) = 
and cosec x = =  .
.
Example 8 Find the value of sin .
.
Solution We know that values of sin x repeats after an interval of 2π. Therefore
sin = sin (10π + ) = sin =
) = sin =  .
.
Example 9 Find the value of cos (–1710°).
Solution We know that values of cos x repeats after an interval of 2π or 360°. Therefore, cos (–1710°) = cos (–1710° + 5 360°)
= cos (–1710° + 1800°) = cos 90° = 0.
EXERCISE 3.2
Find the values of other five trigonometric functions in Exercises 1 to 5.
1. cos x = –  , x lies in third quadrant.
, x lies in third quadrant.
2. sin x =  , x lies in second quadrant.
, x lies in second quadrant.
3. cot x =  , x lies in third quadrant.
, x lies in third quadrant.
4. sec x =  , x lies in fourth quadrant.
, x lies in fourth quadrant.
5. tan x = –  , x lies in second quadrant.
, x lies in second quadrant.
Find the values of the trigonometric functions in Exercises 6 to 10.
6. sin 765° 7. cosec (– 1410°)
8. tan  9. sin (–
9. sin (– )
)
10. cot (–  )
)
3.4 Trigonometric Functions of Sum and Difference of Two Angles
In this Section, we shall derive expressions for trigonometric functions of the sum and difference of two numbers (angles) and related expressions. The basic results in this connection are called trigonometric identities. We have seen that
1. sin (– x) = – sin x
2. cos (– x) = cos x
We shall now prove some more results:
3. cos (x + y) = cos x cos y – sin x sin y
Consider the unit circle with centre at the origin. Let be the angle P4OP1and y be the angle P1OP2. Then (x + y) is the angle P4OP2. Also let (– y) be the angle P4OP3. Therefore, P1, P2, P3 and P4 will have the coordinates P1(cos x, sin x),
P2 [cos (x + y), sin (x + y)], P3 [cos (– y), sin (– y)] and P4 (1, 0) (Fig 3.14).
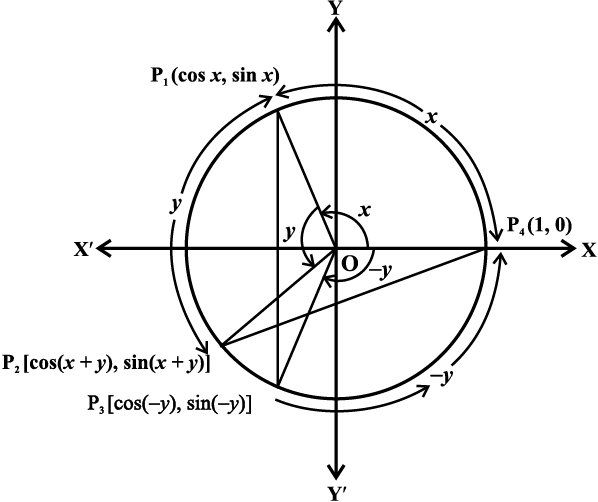
Fig 3.14
Consider the triangles P1OP3 and P2OP4. They are congruent (Why?). Therefore, P1P3 and P2P4 are equal. By using distance formula, we get
P1P32 = [cos x – cos (– y)]2 + [sin x – sin(–y]2
= (cos x – cos y)2 + (sin x + sin y)2
= cos2 x + cos2 y – 2 cos x cos y + sin2 x + sin2 y + 2sin x sin y
= 2 – 2 (cos x cos y – sin x sin y) (Why?)
Also, P2P42 = [1 – cos (x + y)] 2 + [0 – sin (x + y)]2
= 1 – 2cos (x + y) + cos2 (x + y) + sin2 (x + y)
= 2 – 2 cos (x + y)
Since P1P3 = P2P4, we have P1P32 = P2P42.
Therefore, 2 –2 (cos x cos y – sin x sin y) = 2 – 2 cos (x + y).
Hence cos (x + y) = cos x cos y – sin x sin y
4. cos (x – y) = cos x cos y + sin x sin y
Replacing y by – y in identity 3, we get
cos (x + (– y)) = cos x cos (– y) – sin x sin (– y)
or cos (x – y) = cos x cos y + sin x sin y
5. cos( ) = sin x
) = sin x
If we replace x by  and y by x in Identity (4), we get
and y by x in Identity (4), we get
cos () = cos cos x + sin sin x = sin x.
6. sin () = cos x
Using the Identity 5, we have
sin () = cos  = cos x.
= cos x.
7. sin (x + y) = sin x cos y + cos x sin y
We know that
= sin x cos y + cos x sin y
8. sin (x – y) = sin x cos y – cos x sin y
If we replace y by –y, in the Identity 7, we get the result.
9. By taking suitable values of x and y in the identities 3, 4, 7 and 8, we get the following results:
cos  = – sin x sin = cos x
= – sin x sin = cos x
cos (π – x) = – cos x sin (π – x) = sin x
cos (π + x) = – cos x sin (π + x) = – sin x
cos (2π – x) = cos x sin (2π – x) = – sin x
Similar results for tan x, cot x, sec x and cosec x can be obtained from the results of sin x and cos x.
10. If none of the angles x, y and (x + y) is an odd multiple of , then
, then
tan (x + y) = 
Since none of the x, y and (x + y) is an odd multiple of , it follows that cos x,
cos y and cos (x + y) are non-zero. Now
tan (x + y) =  =
=  .
.
Dividing numerator and denominator by cos x cos y, we have
tan (x + y) = 
= 
11. tan ( x – y) = 
If we replace y by – y in Identity 10, we get
tan (x – y) = tan [x + (– y)]
=  =
= 
12. If none of the angles x, y and (x + y) is a multiple of π, then
cot ( x + y) = 
Since, none of the x, y and (x + y) is multiple of π, we find that sin x sin y and
sin (x + y) are non-zero. Now,
cot ( x + y) = 
Dividing numerator and denominator by sin x sin y, we have
cot (x + y) = 
13. cot (x – y) =  if none of angles x, y and x–y is a multiple of π
if none of angles x, y and x–y is a multiple of π
If we replace y by –y in identity 12, we get the result
14. cos 2x = cos2x – sin2 x = 2 cos2 x – 1 = 1 – 2 sin2 x = 
We know that
cos (x + y) = cos x cos y – sin x sin y
Replacing y by x, we get
cos 2x = cos2x – sin2 x
= cos2 x – (1 – cos2 x) = 2 cos2x – 1
Again, cos 2x = cos2 x – sin2 x
= 1 – sin2 x – sin2 x = 1 – 2 sin2 x.
We have cos 2x = cos2 x – sin 2 x = 
Dividing numerator and denominator by cos2 x, we get
cos 2x =  ,
, , where n is an integer
, where n is an integer
15. sin 2x = 2 sinx cos x =  , where n is an integer
, where n is an integer
We have
sin (x + y) = sin x cos y + cos x sin y
Replacing y by x, we get sin 2x = 2 sin x cos x.
Again sin 2x =
Dividing each term by cos2 x, we get
sin 2x =
16. tan 2x = if 2, where n is an integer
if 2, where n is an integer
We know that
tan (x + y) =
Replacing y by x , we get
17. sin 3x = 3 sin x – 4 sin3 x
We have,
sin 3x = sin (2x + x)
= sin 2x cos x + cos 2x sin x
= 2 sin x cos x cos x + (1 – 2sin2 x) sin x
= 2 sin x (1 – sin2 x) + sin x – 2 sin3 x
= 2 sin x – 2 sin3 x + sin x – 2 sin3 x
= 3 sin x – 4 sin3 x
18. cos 3x = 4 cos3 x – 3 cos x
We have,
cos 3x = cos (2x +x)
= cos 2x cos x – sin 2x sin x
= (2cos2 x – 1) cos x – 2sin x cos x sin x
= (2cos2 x – 1) cos x – 2cos x (1 – cos2 x)
= 2cos3 x – cos x – 2cos x + 2 cos3 x
= 4cos3 x – 3cos x.
19. if 3, where n is an integer
if 3, where n is an integer
We have tan 3x = tan (2x + x)
= 

20. (i) cos x + cos y =
(ii) cos x – cos y = –
(iii) sin x + sin y =
(iv) sin x – sin y =
We know that
cos (x + y) = cos x cos y – sin x sin y ... (1)
and cos (x – y) = cos x cos y + sin x sin y ... (2)
Adding and subtracting (1) and (2), we get
cos (x + y) + cos(x – y) = 2 cos x cos y ... (3)
and cos (x + y) – cos (x – y) = – 2 sin x sin y ... (4)
Further sin (x + y) = sin x cos y + cos x sin y ... (5)
and sin (x – y) = sin x cos y – cos x sin y ... (6)
Adding and subtracting (5) and (6), we get
sin (x + y) + sin (x – y) = 2 sin x cos y ... (7)
sin (x + y) – sin (x – y) = 2cos x sin y ... (8)
Let x + y = θ and x – y = φ. Therefore

Since θ and φ can take any real values, we can replace θ by x and φ by y.
Thus, we get
cos x + cos y = 2 cos ; cos x – cos y = – 2 sin
; cos x – cos y = – 2 sin , sin x + sin y = 2 sin; sin x – sin y = 2 cos.
, sin x + sin y = 2 sin; sin x – sin y = 2 cos.
Remark As a part of identities given in 20, we can prove the following results:
21. (i) 2 cos x cos y = cos (x + y) + cos (x – y)
(ii) –2 sin x sin y = cos (x + y) – cos (x – y)
(iii) 2 sin x cos y = sin (x + y) + sin (x – y)
(iv) 2 cos x sin y = sin (x + y) – sin (x – y).
Example 10 Prove that
Solution We have
L.H.S. =
= 3 × × 2 – 4 sin × 1 = 3 – 4 sin
× 1 = 3 – 4 sin
= 3 – 4 × = 1 = R.H.S.
Example 11 Find the value of sin 15°.
Solution We have
sin 15° = sin (45° – 30°)
= sin 45° cos 30° – cos 45° sin 30°
= .
.
Example 12 Find the value of tan .
.
Solution We have
tan = tan = tan
= tan
= =
=
Example 13 Prove that
 .
.
Solution We have
L.H.S.
Dividing the numerator and denominator by cos x cos y, we get
.
Example 14 Show that
tan 3 x tan 2 x tan x = tan 3x – tan 2 x – tan x
Solution We know that 3x = 2x + x
Therefore, tan 3x = tan (2x + x)
or 
or tan 3x – tan 3x tan 2x tan x = tan 2x + tan x
or tan 3x – tan 2x – tan x = tan 3x tan 2x tan x
or tan 3x tan 2x tan x = tan 3x – tan 2x – tan x.
Example 15 Prove that
Solution Using the Identity 20(i), we have
L.H.S. 
= 2 cos cos x = 2 ×
cos x = 2 × cos x =
cos x = cos x = R.H.S.
cos x = R.H.S.
Example 16 Prove that 
Solution Using the Identities 20 (i) and 20 (iv), we get
L.H.S. = =
= = R.H.S.
= R.H.S.
Example 17 Prove that
Solution We have
L.H.S.
 = tan x = R.H.S.
= tan x = R.H.S.
EXERCISE 3.3
Prove that:
1. sin2 + cos2
+ cos2 – tan2
– tan2 2. 2sin
2. 2sin + cosec2
+ cosec2 
3. 4.
4. 
5. Find the value of:
(i) sin 75° (ii) tan 15°
Prove the following:
6.
7 .8.
.8.
9.
10. sin (n + 1)x sin (n + 2)x + cos (n + 1)x cos (n + 2)x = cos x
11. 
12. sin2 6x – sin2 4x = sin 2x sin 10x 13. cos2 2x – cos2 6x = sin 4x sin 8x
14. sin2 x + 2 sin 4x + sin 6x = 4 cos2 x sin 4x
15. cot 4x (sin 5x + sin 3x) = cot x (sin 5x – sin 3x)
16.  17.
17.
18.  19.
19. 
20. 21.
21. 
22. cot x cot 2x – cot 2x cot 3x – cot 3x cot x = 1
23. 24. cos 4x = 1 – 8sin2 x cos2 x
24. cos 4x = 1 – 8sin2 x cos2 x
25. cos 6x = 32 cos6 x – 48cos4 x + 18 cos2 x – 1
3.5 Trigonometric Equations
Equations involving trigonometric functions of a variable are called trigonometric equations. In this Section, we shall find the solutions of such equations. We have already learnt that the values of sin x and cos x repeat after an interval of 2π and the values of tan x repeat after an interval of π. The solutions of a trigonometric equation for which 0 ≤ x < 2π are called principal solutions. The expression involving integer ‘n’ which gives all solutions of a trigonometric equation is called the general solution. We shall use ‘Z’ to denote the set of integers.
The following examples will be helpful in solving trigonometric equations:
Example 18 Find the principal solutions of the equation .
.
Solution We know that,
Therefore, principal solutions are  .
.
Example 19 Find the principal solutions of the equation .
.
Solution We know that
Therefore, principal solutions are .
.
We will now find the general solutions of trigonometric equations. We have already seen that:
We shall now prove the following results:
Theorem 1 For any real numbers x and y,
sin x = sin y implies x = nπ + (–1)n y, where n ∈ Z
Proof If sin x = sin y, then
sin x – sin y = 0 or 2cos = 0
= 0
which gives cos = 0 or sin
= 0 or sin = 0
= 0
Therefore = (2n + 1) or = nπ, where n ∈ Z
or = nπ, where n ∈ Z
i.e. x = (2n + 1) π – y or x = 2nπ + y, where n∈Z
Hence x = (2n + 1)π + (–1)2n + 1 y or x = 2nπ +(–1)2n y, where n ∈ Z.
Combining these two results, we get
x = nπ + (–1)n y, where n ∈ Z.
Theorem 2 For any real numbers x and y, cos x = cos y, implies x= 2nπ ± y,
where n ∈ Z
Proof If cos x = cos y, then
cos x – cos y = 0 i.e., –2 sin sin = 0
Thus sin = 0 or sin = 0
Therefore = nπ or = nπ, where n ∈ Z
i.e. x = 2nπ – y or x = 2nπ + y, where n ∈ Z
Hence x = 2nπ ± y, where n ∈ Z
Theorem 3 Prove that if x and y are not odd mulitple of  , then
, then
tan x = tan y implies x = nπ + y, where n ∈ Z
Proof If tan x = tan y, then tan x – tan y = 0
or 
which gives sin (x – y) = 0 (Why?)
Therefore x – y = nπ, i.e., x = nπ + y, where n ∈ Z
Example 20 Find the solution of sin x = – .
.

Solution We have
Hence
Note  is one such value of x for which
is one such value of x for which . One may take any other value of x for which
. One may take any other value of x for which . The solutions obtained will be the same although these may apparently look different.
. The solutions obtained will be the same although these may apparently look different.
Example 21 Solve .
.
Solution We have,
Therefore , where n ∈ Z.
, where n ∈ Z.
Example 22 Solve 
Solution We have,
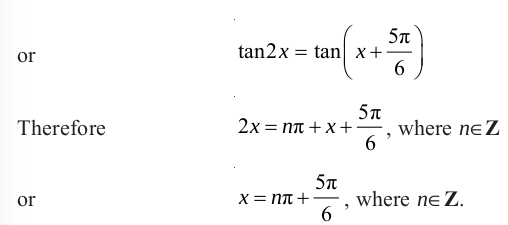
Example 23 Solve sin 2x – sin 4x + sin 6x = 0.
Solution The equation can be written as

or 
i.e. 
Therefore sin 4x = 0 or 
i.e. 
Example 24 Solve 2 cos2 x + 3 sin x = 0
Solution The equation can be written as

or 
or 
Hence sin x = or sin x = 2
or sin x = 2
But sin x = 2 is not possible (Why?)
Therefore sin x = = .
.
Hence, the solution is given by
EXERCISE 3.4
Find the principal and general solutions of the following equations:
1. 2. sec x = 2
2. sec x = 2
3. 4. cosec x = – 2
4. cosec x = – 2
Find the general solution for each of the following equations:
5. cos 4 x = cos x 6. cos 3x + cos x– cos 2x = 0
7. sin 2x + cos x= 0 8. sec2 2x = 1– tan 2x
9. sin x + sin 3x + sin 5x = 0
Miscellaneous Examples
Example 25 If sin x = , cos y =
, cos y = , where x and y both lie in second quadrant, find the value of sin (x + y).
, where x and y both lie in second quadrant, find the value of sin (x + y).
Solution We know that
sin (x + y) = sin x cos y + cos x sin y ... (1)
Now cos2 x= 1 – sin2 x = 1 – =
=
Therefore cos x = .
.
Since x lies in second quadrant, cos x is negative.
Hence cos x =
Now sin2y = 1 – cos2y = 1 –
i.e. sin y = .
.
Since y lies in second quadrant, hence sin y is positive. Therefore, sin y = . Substituting the values of sin x, sin y, cos x and cos y in (1), we get
. Substituting the values of sin x, sin y, cos x and cos y in (1), we get
 =
=  .
.
Example 26 Prove that
 .
.
Solution We have
L.H.S. =
=
= =
=
=
= = R.H.S.
= R.H.S.
Example 27 Find the value of tan  .
.
Solution Let  . Then
. Then .
.
or y2 + 2y – 1 = 0
Therefore y =
Since  lies in the first quadrant,
lies in the first quadrant,  is positve. Hence
is positve. Hence
 .
.
Example 28 If , find the value of sin
, find the value of sin , cos and tan.
, cos and tan.
Solution Since  is negative.
is negative.
Also .
.
Therefore, sin is positive and cos is negative.
Now sec2 x = 1 + tan2 x = 
Therefore cos2 x = or cos x = (Why?)
(Why?)
Now  = 1 – cos x =
= 1 – cos x = .
.
Therefore sin2 =
or sin =  (Why?)
(Why?)
Again 2cos2 = 1+ cos x =
Therefore cos2 =
or cos = (Why?)
(Why?)
Hence tan = = – 3.
= – 3.
Example 29 Prove that 
Solution We have
Miscellaneous Exercise on Chapter 3
Prove that:
1.
2. (sin 3x + sin x) sin x + (cos 3x – cos x) cos x = 0
3. (cos x + cos y)2 + (sin x – sin y)2 = 4 cos2 
4. (co – cos y)2 + (si– sin y)2 = 4 sin2
– cos y)2 + (si– sin y)2 = 4 sin2
5. sin x + sin 3x + sin 5x + sin 7x = 4 cos x cos 2x sin 4x
6.
7. sin 3x + sin 2x – sin x = 4sin x cos cos
Find sin, cos and tan in each of the following :
8. tan x =  , x in quadrant II 9. cos x =
, x in quadrant II 9. cos x = , x in quadrant III
, x in quadrant III
10. sin x = ,x in quadrant II
,x in quadrant II
Summary
◾ If in a circle of radius r, an arc of length l subtends an angle of θ radians, then
l = r θ
◾ Radian measure = Degree measure
Degree measure
◾ Degree measure = Radian measure
Radian measure
◾ cos2 x + sin2 x = 1
◾ 1 + tan2 x = sec2 x
◾ 1 + cot2 x = cosec2 x
◾ cos (2nπ + x) = cos x
◾ sin (2nπ + x) = sin x
◾ sin (– x) = – sin x
◾ cos (– x) = cos x
◾ cos (x + y) = cos x cos y – sin x sin y
◾ cos (x – y) = cos x cos y + sin x sin y
◾ cos = sin x
= sin x
◾ sin  = cos x
= cos x
◾ sin (x + y) = sin x cos y + cos x sin y
◾ sin (x – y) = sin x cos y – cos x sin y
◾ cos  = – sin x sin
= – sin x sin  = cos x
= cos x
cos (π – x) = – cos x sin (π – x) = sin x
cos (π + x) = – cos x sin (π + x) = – sin x
cos (2π – x) = cos x sin (2π – x) = – sin x
◾ If none of the angles x, y and (x y) is an odd multiple of
y) is an odd multiple of , then
, then
tan (x + y) =
◾ tan (x – y) =
◾ If none of the angles x, y and (x y) is a multiple of π, then
cot (x + y) =
◾ cot (x – y) =
◾ cos 2x = cos2 x – sin2 x = 2cos2 x – 1 = 1 – 2 sin2 x
◾ sin 2x = 2 sin x cos x
◾ tan 2x =
◾ sin 3x = 3sin x– 4sin x
◾ cos 3x = 4cos x – 3cos x
◾ tan 3x =
◾ (i) cos x + cos y = 2cos
(ii) cos x – cos y = – 2sin
(iii) sin x + sin y = 2 sin 
(iv) sin x – sin y = 2cos
◾ (i) 2cos x cos y = cos (+ y) + cos (– y)
(ii) – 2sin x sin y = cos (x + y) – cos (x – y)
(iii) 2sin x cos y = sin (x + y) + sin (x – y)
(iv) 2 cos x sin y = sin (x + y) – sin (x – y).
◾ sin = 0 gives x = nπ, where n ∈ Z.
◾cos x = 0 gives x = (2n + 1) , where n ∈ Z.
, where n ∈ Z.
◾ sin x = sin y implies x = nπ + (– 1)n y, where n ∈ Z.
◾ cos x = cos y, implies x = 2nπ ± y, where n ∈ Z.
◾ tan x = tan y implies x = nπ + y, where n ∈ Z.
Historical Note
The study of trigonometry was first started in India. The ancient Indian Mathematicians, Aryabhatta (476), Brahmagupta (598), Bhaskara I (600) and Bhaskara II (1114) got important results. All this knowledge first went from India to middle-east and from there to Europe. The Greeks had also started the study of trigonometry but their approach was so clumsy that when the Indian approach became known, it was immediately adopted throughout the world.
In India, the predecessor of the modern trigonometric functions, known as the sine of an angle, and the introduction of the sine function represents the main contribution of the siddhantas (Sanskrit astronomical works) to the history of mathematics.
Bhaskara I (about 600) gave formulae to find the values of sine functions for angles more than 90°. A sixteenth century Malayalam work Yuktibhasa (period) contains a proof for the expansion of sin (A + B). Exact expression for sines or cosines of 18°, 36°, 54°, 72°, etc., are given by
Bhaskara II.
The symbols sin–1 x, cos–1 x, etc., for arc sin x, arc cos x, etc., were suggested by the astronomer Sir John F.W. Hersehel (1813) The names of Thales (about 600 B.C.) is invariably associated with height and distance problems. He is credited with the determination of the height of a great pyramid in Egypt by measuring shadows of the pyramid and an auxiliary staff (or gnomon) of known height, and comparing the ratios:
 = tan (sun’s altitude)
= tan (sun’s altitude)
Thales is also said to have calculated the distance of a ship at sea through the proportionality of sides of similar triangles. Problems on height and distance using the similarity property are also found in ancient Indian works.